+6012-560 7479
plgofficial12@gmail.com
Level 2, Block C05, Faculty of Built Environment & Surveying, Universiti Teknologi Malaysia, 81310 Johor Bahru, Johor
The Digital Accident Record System (DARS) is an integrated geospatial and multimedia-based platform developed to enhance the documentation, analysis, and reconstruction of road traffic accidents by addressing the limitations of conventional reporting methods that are often manual, fragmented, and lacking spatial intelligence. The system provides a structured digital interface for systematic data acquisition, capturing essential information such as victim and vehicle details, geographic coordinates, time of occurrence, and supporting multimedia evidence including images and videos, thereby ensuring improved data consistency, reliability, and accessibility for investigative purposes. A key feature of DARS is its integration with Geographic Information Systems (GIS), which enables spatial visualization and mapping of accident locations, supporting the identification of accident hotspots, spatial patterns, and temporal trends for more informed decision-making in road safety management. Critically, DARS incorporates high-fidelity three-dimensional (3D) scene reconstruction generated using Terrestrial Laser Scanning (TLS) or Close-Range Photogrammetry (CRP), where TLS provides highly accurate point cloud data for capturing detailed physical geometry, while CRP utilizes convergent multi-view imagery to reconstruct realistic 3D models of accident scenes; together, these approaches enable precise representation of vehicle positions, impact points, and environmental context, significantly enhancing forensic analysis. The system further integrates two-dimensional (2D) and 3D visualization with dynamic simulation and multimedia playback, allowing users to reconstruct accident scenarios in an intuitive and interactive manner, thereby supporting clearer interpretation, effective communication, and stronger evidential presentation in legal and insurance contexts. Overall, DARS represents a next-generation accident forensic system that combines geospatial intelligence, advanced 3D modeling, and digital visualization within a unified platform, offering significant potential to improve investigative accuracy, streamline reporting workflows, and contribute to safer and more efficient transportation management.

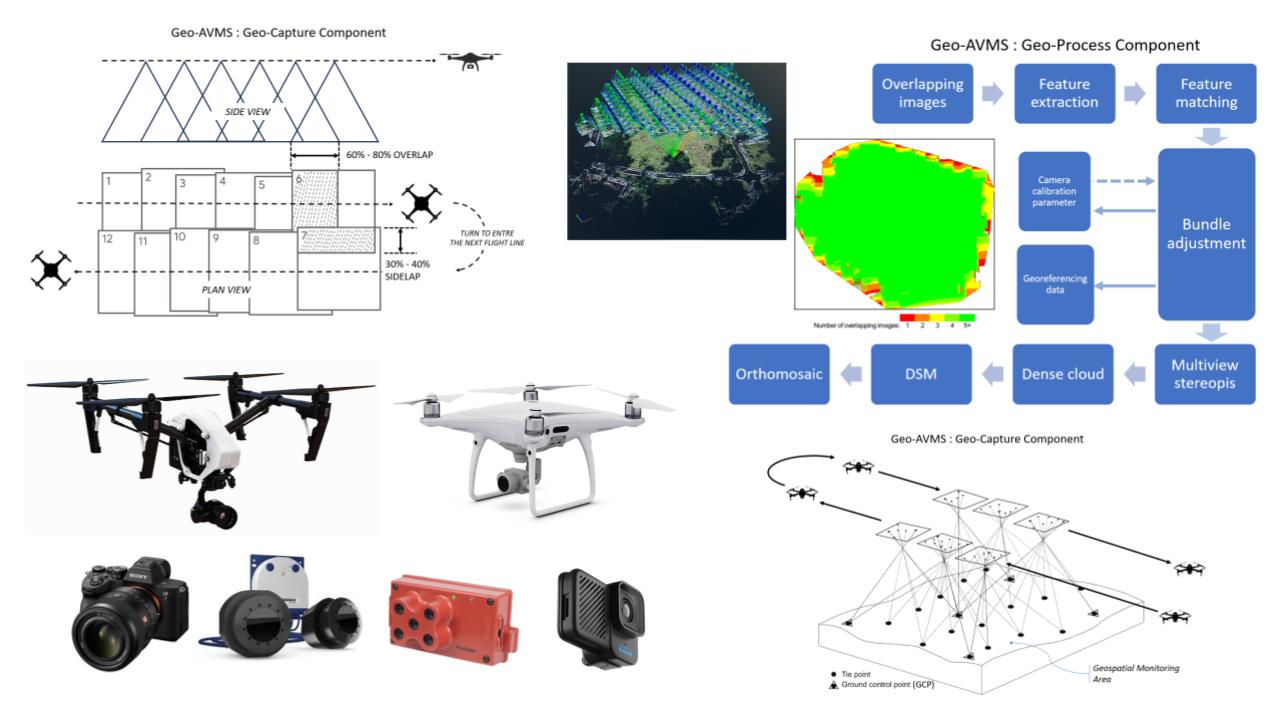
The Geospatial-Based Aerial View Monitoring System (Geo-AVMS) is an advanced geospatial intelligence platform designed to support high-resolution monitoring, mapping, and analysis of physical environments through the integration of unmanned aerial vehicles (UAVs), photogrammetric processing, and geospatial data analytics. The system addresses the growing demand for efficient, accurate, and scalable spatial data acquisition by leveraging aerial imaging technologies combined with automated processing workflows. Geo-AVMS begins with a structured geo-capture component, where UAVs equipped with high-resolution cameras and sensors acquire overlapping aerial images following optimized flight planning parameters, typically achieving 60–80% forward overlap and 30–40% sidelap to ensure complete coverage and reliable reconstruction. These datasets are then processed through a robust geo-processing pipeline involving feature extraction, feature matching, and bundle adjustment, supported by camera calibration parameters and georeferencing data such as ground control points (GCPs), to ensure geometric accuracy and spatial consistency. The system employs multiview stereopsis techniques to generate dense point clouds, which are subsequently transformed into Digital Surface Models (DSM) and high-resolution orthomosaics, enabling detailed representation of terrain and surface features. By integrating these outputs, Geo-AVMS provides comprehensive spatial insights for applications such as environmental monitoring, infrastructure assessment, disaster management, and land-use analysis. The platform supports visualization and analysis in both 2D and 3D environments, enhancing interpretability and decision-making capabilities for users across various sectors. Overall, Geo-AVMS represents a scalable and intelligent aerial monitoring solution that combines UAV-based data acquisition, photogrammetric modeling, and geospatial analytics into a unified system, offering significant improvements in data accuracy, operational efficiency, and real-time spatial awareness.
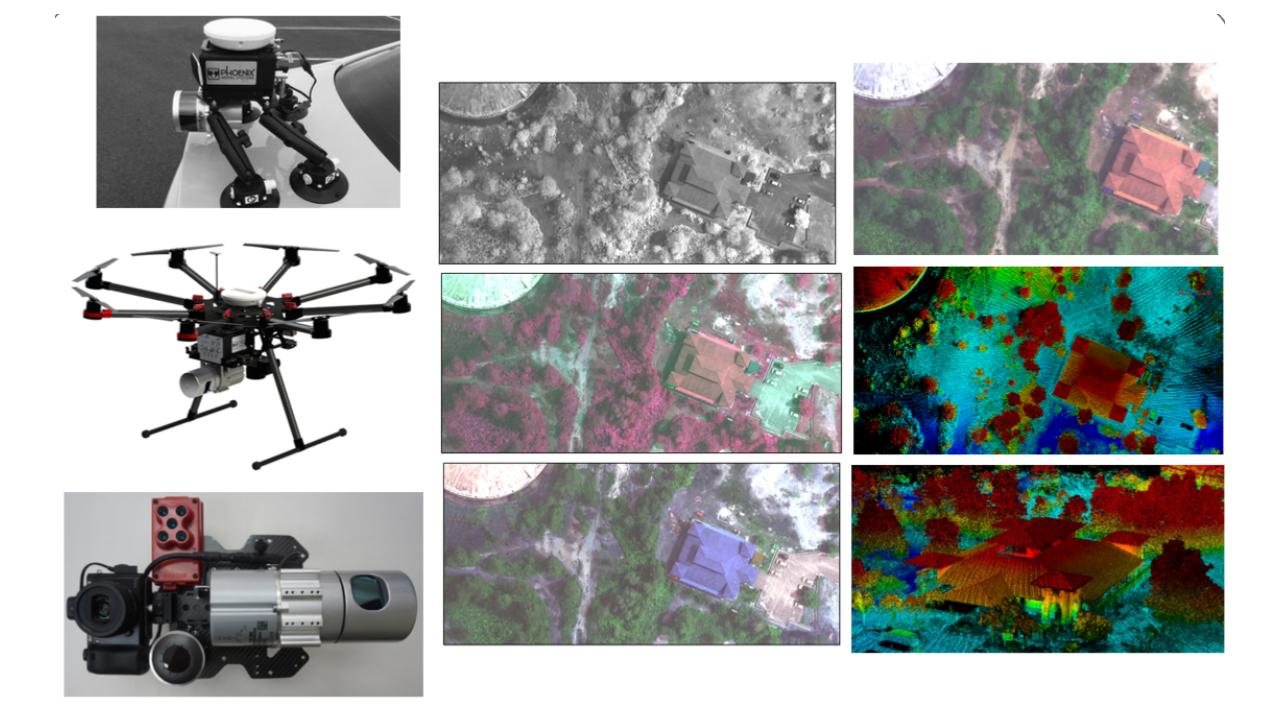
The Rapid Airborne Geospatial Mapping System (RAGMap System) is an advanced geospatial data acquisition and processing platform designed to provide rapid, accurate, and high-resolution mapping of physical environments through the integration of Unmanned Aerial Vehicles (UAVs), Light Detection and Ranging (LiDAR) technology, and multispectral imaging sensors. The system was developed through the support of the KPT MyLAB Grant (Malaysia Laboratories for Academia-Business Collaboration), a strategic initiative of the Ministry of Higher Education (KPT), Malaysia, aimed at strengthening academia-industry collaboration and accelerating the commercialization of research-based innovations. RAGMap was established to address the growing demand for efficient, reliable, and cost-effective geospatial data collection in various sectors, including environmental monitoring, infrastructure inspection, disaster management, forestry, agriculture, urban planning, land administration, and natural resource management. By integrating multiple airborne sensing technologies into a single operational framework, the system significantly enhances the speed and quality of spatial data acquisition while reducing the limitations associated with conventional surveying methods. The airborne platform is equipped with high-performance sensors comprising a LiDAR system for generating highly accurate three-dimensional (3D) point clouds, a high-resolution RGB camera for true-colour imagery, and a multispectral sensor for advanced vegetation and surface material analysis. Through synchronized data acquisition and precise positioning technologies, RAGMap is capable of collecting dense, georeferenced datasets over large geographical areas within a short operational timeframe. Following data acquisition, the collected datasets are processed through an integrated workflow involving sensor calibration, trajectory correction, georeferencing, point cloud generation, photogrammetric processing, and multi-sensor data fusion. The workflow produces a range of geospatial outputs, including high-resolution orthophotos, Digital Surface Models (DSM), Digital Terrain Models (DTM), multispectral vegetation indices, and high-density 3D point clouds. These products enable comprehensive analysis of terrain morphology, structural conditions, land cover characteristics, vegetation health, and environmental changes. The incorporation of multispectral imaging technology further expands the system’s analytical capabilities by enabling the detection and classification of vegetation conditions, crop health, environmental stress indicators, and surface material variations. Combined with advanced visualization and spatial analysis tools, RAGMap supports both two-dimensional (2D) and three-dimensional (3D) representations of the mapped environment, providing users with actionable geospatial intelligence for informed decision-making. As a product developed under the KPT MyLAB commercialization ecosystem, RAGMap represents a next-generation rapid mapping solution that successfully integrates airborne LiDAR, photogrammetry, and multispectral sensing technologies into a unified geospatial platform. The system delivers substantial improvements in mapping accuracy, operational efficiency, data acquisition speed, and analytical capability, positioning it as a valuable technology solution for government agencies, industry practitioners, researchers, and environmental management organizations seeking high-quality spatial information for strategic planning and operational applications.
The 3D Surveillance System (3D Surv) is an advanced vision-based monitoring platform designed to enhance situational awareness, human detection, and spatial analysis through the integration of multi-camera imaging, photogrammetric principles, and three-dimensional (3D) reconstruction techniques. The system addresses the limitations of conventional 2D surveillance, which often lacks depth perception and accurate spatial interpretation, by introducing a 3D-enabled framework capable of capturing, analyzing, and visualizing human activities within a measurable spatial context. 3D Surv utilizes synchronized multi-view camera configurations arranged in calibrated geometries to acquire overlapping images of a monitored scene, enabling precise feature extraction and matching across multiple perspectives. Through relative orientation and triangulation processes, the system reconstructs 3D coordinates of key points, particularly focusing on human body features and facial landmarks, allowing accurate positioning, tracking, and behavior analysis. The incorporation of geometric frameworks and control structures enhances calibration accuracy and ensures robust spatial consistency across different viewpoints. The system further integrates computer vision techniques for automated feature detection, including facial recognition markers and body keypoints, supporting applications in identity verification, movement tracking, and anomaly detection. By generating 3D representations of individuals and their surroundings, 3D Surv enables improved interpretation of spatial relationships, distances, and interactions within monitored environments. The platform supports real-time or near real-time visualization, providing actionable insights for security, surveillance, and forensic analysis in indoor and controlled environments such as offices, laboratories, and restricted facilities. Overall, the 3D Surv system represents a next-generation surveillance solution that combines photogrammetry, computer vision, and spatial analytics into a unified platform, offering significant improvements in monitoring accuracy, depth perception, and intelligent scene understanding.

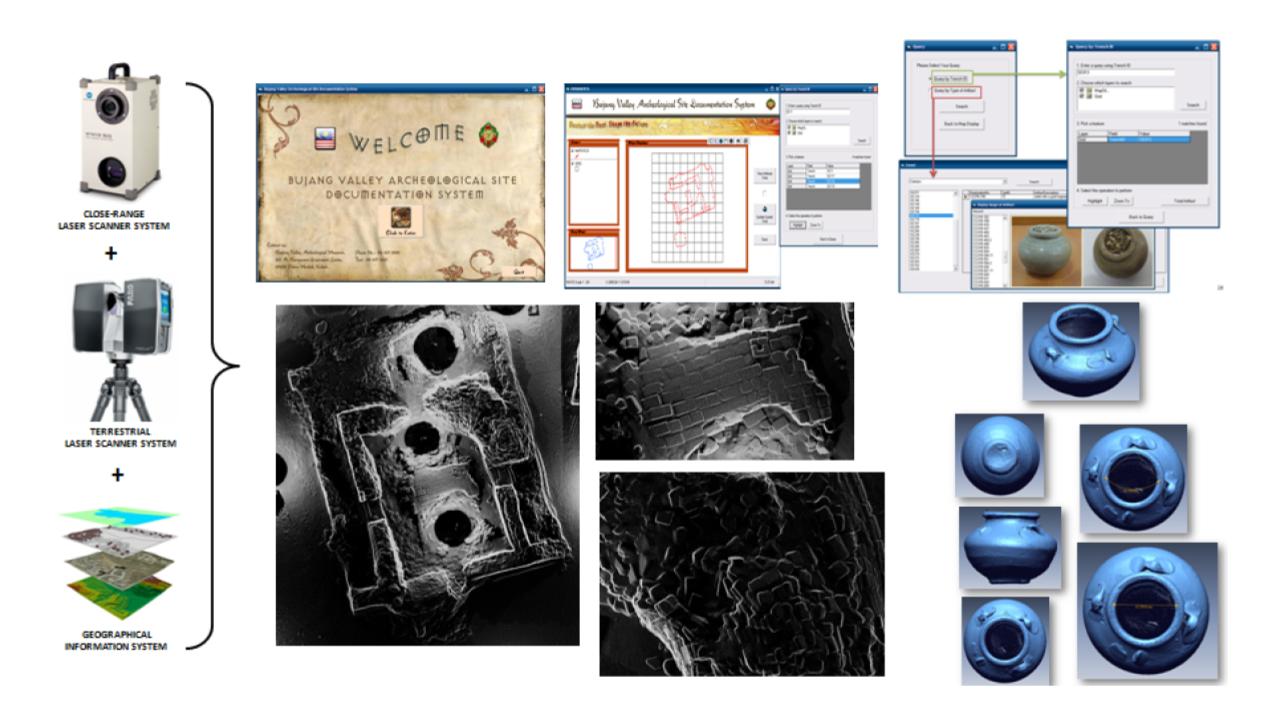
The Malaysian Archaeological Documentation System (My-Archeo) is an integrated digital platform developed to support the systematic documentation, preservation, and analysis of archaeological heritage through the fusion of advanced geospatial technologies, 3D scanning, and database management systems. The system addresses the challenges associated with conventional archaeological documentation, which often relies on manual recording methods that are time-consuming, inconsistent, and prone to data loss, by introducing a comprehensive digital framework for accurate and efficient heritage recording. My-Archeo integrates close-range laser scanning and terrestrial laser scanning technologies to capture high-resolution three-dimensional (3D) data of archaeological sites and artifacts, enabling precise geometric representation of structures, excavation areas, and cultural objects. These datasets are further organized and managed within a Geographic Information System (GIS) environment, allowing spatial referencing, layering, and analysis of archaeological information in a structured and accessible format. The system supports the generation of detailed 3D models and spatial databases that facilitate documentation, condition assessment, and long-term monitoring of heritage assets. In addition, My-Archeo incorporates a user-friendly interface for data retrieval, visualization, and interpretation, enabling researchers, conservators, and stakeholders to access and analyze archaeological information efficiently. The platform enhances research capabilities by supporting digital reconstruction, comparative analysis, and visualization of artifacts, including fragmented objects, thereby contributing to improved understanding of historical contexts and cultural significance. Overall, My-Archeo represents a comprehensive digital heritage solution that combines geospatial technology, 3D modeling, and database systems into a unified platform, offering significant improvements in documentation accuracy, data preservation, and heritage management for archaeological applications in Malaysia.
The Malaysian 3D Assets Management System (My-Assets) is an advanced geospatial-based platform developed to enhance the management, visualization, and analysis of physical assets through the integration of three-dimensional (3D) modeling, terrestrial laser scanning (TLS), and database-driven asset management systems. The system addresses the limitations of conventional asset management approaches, which are typically reliant on 2D records and non-spatial databases, by introducing a comprehensive digital framework that enables accurate spatial representation and efficient tracking of assets within their real-world environments. My-Assets utilizes TLS technology to capture high-resolution point cloud data of indoor and built environments, allowing the generation of detailed 3D models that accurately represent asset locations, configurations, and spatial relationships. These models are integrated with a structured database containing asset attributes such as identification, type, specifications, condition, ownership, and maintenance history, providing a holistic view of asset information. The system features an interactive 3D visualization interface that enables users to navigate environments, locate assets, and retrieve detailed information in real time, thereby improving operational efficiency and decision-making processes. My-Assets supports applications in facilities management, institutional asset tracking, infrastructure monitoring, and smart building systems, where accurate and up-to-date asset information is critical. By combining geospatial technology, 3D visualization, and intelligent data management within a unified platform, My-Assets offers significant improvements in asset traceability, data accuracy, and maintenance planning. Overall, the system represents a next-generation asset management solution that transforms traditional practices into a spatially enabled, digital, and intelligent framework aligned with the principles of digital twin and smart asset ecosystems.
